
字节跳动 Seed 发文宣布,其与清华大学赵明国教授团队联合研发的人形机器人运动算法 “HumanoidKick” 在 2025RoboCup 机器人世界杯人形组成人组比赛中,成功帮助清华火神队获得冠军。这也是中国机器人足球队首次在机器人世界杯该组别夺冠。
根据介绍,此次夺冠的关键之一是基于视觉的端到端自主踢球算法 HumanoidKick,由字节跳动 Seed 团队与清华大学赵明国教授团队联合提出并验证。
HumanoidKick 算法面向人形机器人硬件,通过基于视觉的深度强化学习,实现了 “找球 - 追球 - 踢球” 全过程的统一策略,在实际足球比赛中验证有效。
HumanoidKick 算法尝试解决以下三项实际挑战:
- 从视觉到行动的实时联动:传统机器人足球方案依赖手动编程的预设策略,面对场上变化,常陷入动作卡顿的困境,错失进攻的有利时机。该算法通过端到端深度强化学习方法,构建了视觉感知与机器人运动控制的毫秒响应机制,让机器人能像人类球员一样边 “看” 边 “动”。
- 从动作整合到自主决策:经过数千个环境的并行训练,机器人得以将多种分散的动作技能整合为统一连贯的端到端策略,构建起 “单个动作” “赛场行为” “竞技策略” 之间的关联。面对实时变化的赛场动态,机器人可以自主决策行动,并泛化出自适应的踢球能力。这种能力进化让机器人摆脱了被动执行预设动作的局限,实现了从零散技能到完整策略的突破。
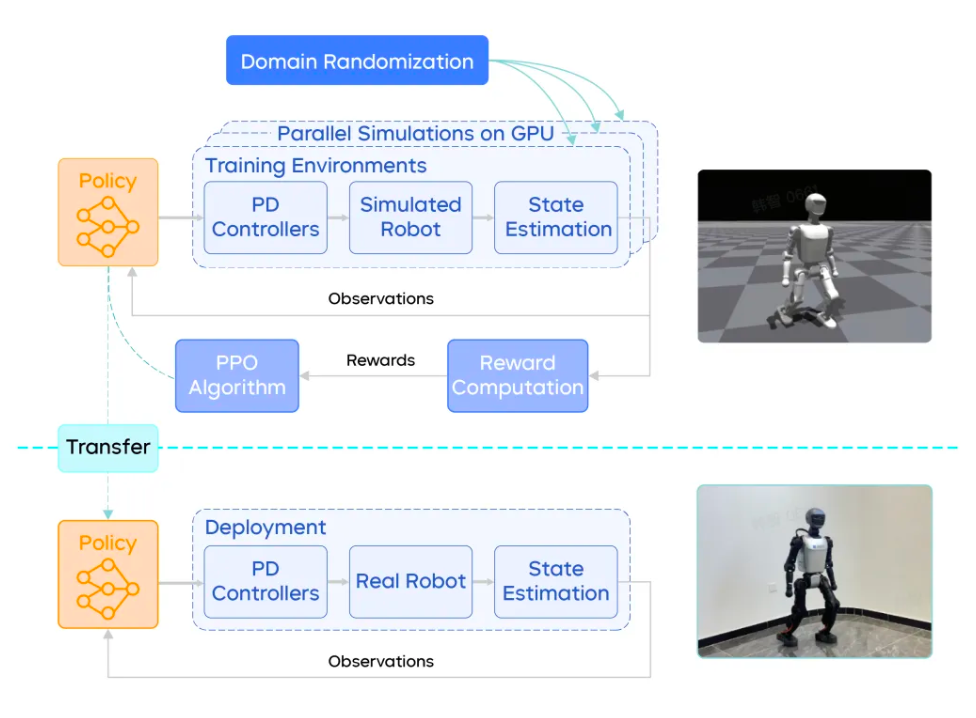
- 从仿真到真实环境的适应:为了让算法在真实世界中保持稳定,团队采用精确建模和域随机化结合的训练方案 —— 在仿真环境中,建模真实世界的感知噪声和物理扰动(如地面条件、关节噪声),让机器人在仿真环境中 “经历” 各种现实极端场景,实现从仿真环境到真机的无缝应用。
依托仿真环境中的海量训练,HumanoidKick 算法在现实赛场中成功帮助机器人脱离既定动作流程束缚,依据瞬息万变的赛场态势,迅速自主规划行动方案。在比赛中,机器人展现出了较好的反应速度,最终取得胜利。






